

الكلب الكبير
 |
الكلب الكبير هو روبوت عسكري تقوم الولايات المتحدة الأمريكية بتطويره من أجل مساعدة الجنود
في المهمات العسكرية عن طريق حمل أمتعتهم أو ما شابه.
نقوم اليوم بدراسة تفصيليلية لهذا الروبوت حتى يتسنى للمهتمين منكم أن ينجزوا مثله أو خيرا منه.
|
تقديم
الهدف وراء "سلسلة ابدأ من حيث انتهوا" هو تزويدكم بتفاصيل المشاريع الحالية حتى يتسنى لكل مهتم أن يشمر على ذراعيه ويبدأ بصنع ما يستفيذه منها، وحتى لا يبقى البعض منا يرى الفجوة بيننا وبينهم. لقد قام الروس بسرقة تصاميم القنبلة النووية وبالتالي أصبحوا قوة عسكرية قوية أيضا. ففي هذه السلسلة لا نتطرق إلى التصميم فحسب بل نأخذك في كثير من التفاصيل حتى ترتسم الصورة كاملة في ذهنك. وإنجاز مثل هذا المقال العلمي تطلب مني وقتا وجهدا كبيرين في الحقيقية. أرجوا أن تستفيدوا منه.
|
الهدف
عندما تريد أن تبدأ أي مشروع دنيوي كان أو أخروي فقم بوضع هدف أمامك حتى تعمل من أجله. فإن استعصى عليك إيجاد الهدف فقل وبكل بساطة أنك تريد التسلية عن طريق صنع هذه الآلة لا غير.
الهدف وراء إنشاء روبوت الكلب الكبير هو كالتالي:
|
إنجاز روبوت قادر على التحرك والتنقل إلى أي مكان يمكن للإنسان أو الحيوان التنقل إليه
|
 |
هذا الروبوت سيقوم بمساعدة الجنود في مهماتهم العسكرية عن طريق حمل أمتعتهم ومرافقتهم أينما ولوا وحيثما ارتحلوا.
أمثلة








التفكر
| الكثير منا يعلم أن الكلب مزود بحاسة شم خارقة والوفاء لصاحبه من أسمى الصفات التي تميزه. ولعل عمل بحث علمي حول محاكاة حاسة الشم لدى الكلب قد تكون من بين الاختراعات المدهشة تأتي بها أنت أيها القارئ. ولعل دراسة صفة الوفاء لدى الكلاب لم يتطرق إليها أحد بعمق لحد الآن، فلربما قد يكون لها نفع لبعض الناس حتى يتعلموا الوفاء. وهذه إشارة مني إلى كل من له شغف حول دراسة سلوكيات الحيوانات والتفكر فيها. |




أما المشي أو الجري لدى الكلاب فهو آية أخرى من آياته. إذ لدى كلاب الصيد المسماة بالسلوقي طريقة جري متميزة وسرعة فائقة تبلغ … كليومترا في الساعة. وروبوتنا اليوم الذي نتحدث عنه يركز على هذه الميزة لدى الكلاب فقط على ما سيبدوا لكم. فالكلب إذا ضرب من جنبه فإنه قد لا يسقط على اﻷرض بسهولة، كذلك وأن الكلب قد يمشي على معظم أصناف اﻷرض من تربة ورمل وصخور وما إلى ذلك مثله في ذلك مثل العديد من الحيوانات اﻷخرى.
التصميم العام
الحاسوب
الدوال اﻷساسية التي تمت برمجتها باستعمال اللغة ++C تتمثل في المحاور التالية:
التحكم : أي التحكم بطريقة المشي لدى اﻷرجل.
الاتصالات
توزيع الكهرباء لمختلف أجهزة الكلب الكبير.
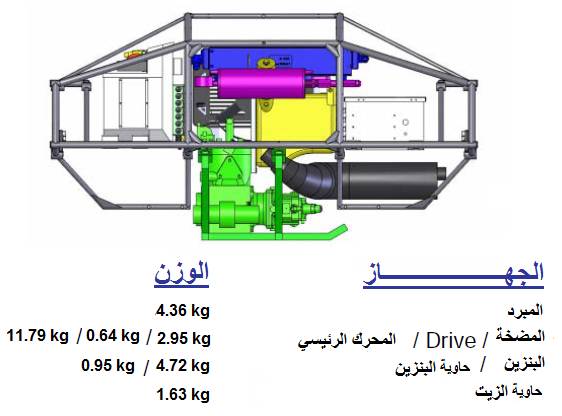
المحرك الرئيسي
اﻷرجل
المستشعرات الإليكترونية
طريقة التحكم بالروبوت
نموذج الكلب الكبير BigDog
نموذج الكلب العملاق LS3
النموذج HyQ الإيطالي
وهاك مختلف النماذج لهذا الروبوت:
        
يمكنك أن ترى مختلف وظائفه في هذا الفيديو:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
























وفي الأخير
| أرجوا من الله أن يسعفنا الحظ للتطرق إلى برمجة المزيد من المستشعرات الإليكترونية في سلسلة برمجة المستشعرات الاليكترونية من أجل مساعدتكم على صناعة مختلف الروبوتات من سيارات وطائرات ومركبات وغواصات وما إلى ذاك. وإذا كان باستطاعتك أنت أيها القارئ مساعدتنا في هذا فسنكون ممتنين لك وعسى الله أن يجعلها حسنة جارية لك للمساعدة في بناء الأمة. فيد واحدة لا تصفق!!!! |

بقلم soufian najim
سفيان، احب أن أضع كل ما أعرف من معلومات حول الحاسوب والتقنيات الجديدة، وخطرت لي فكرة عمل مدونة تضم كل المجالات التعليمية التي أستطيع إفادتكم بها ، فأرجوا ان لاتبخلوا علي أيضا بمتابعتكم لمواضيعي كما ان تعليقاتكم تهمني وتزيد من عطائي لكم إخوتي الكرام وأي استفسار ان موجود وشكرا

 0 التعليقات
0 التعليقات








